狗腿的摆线可以使用 https://zhuanlan.zhihu.com/p/69869440
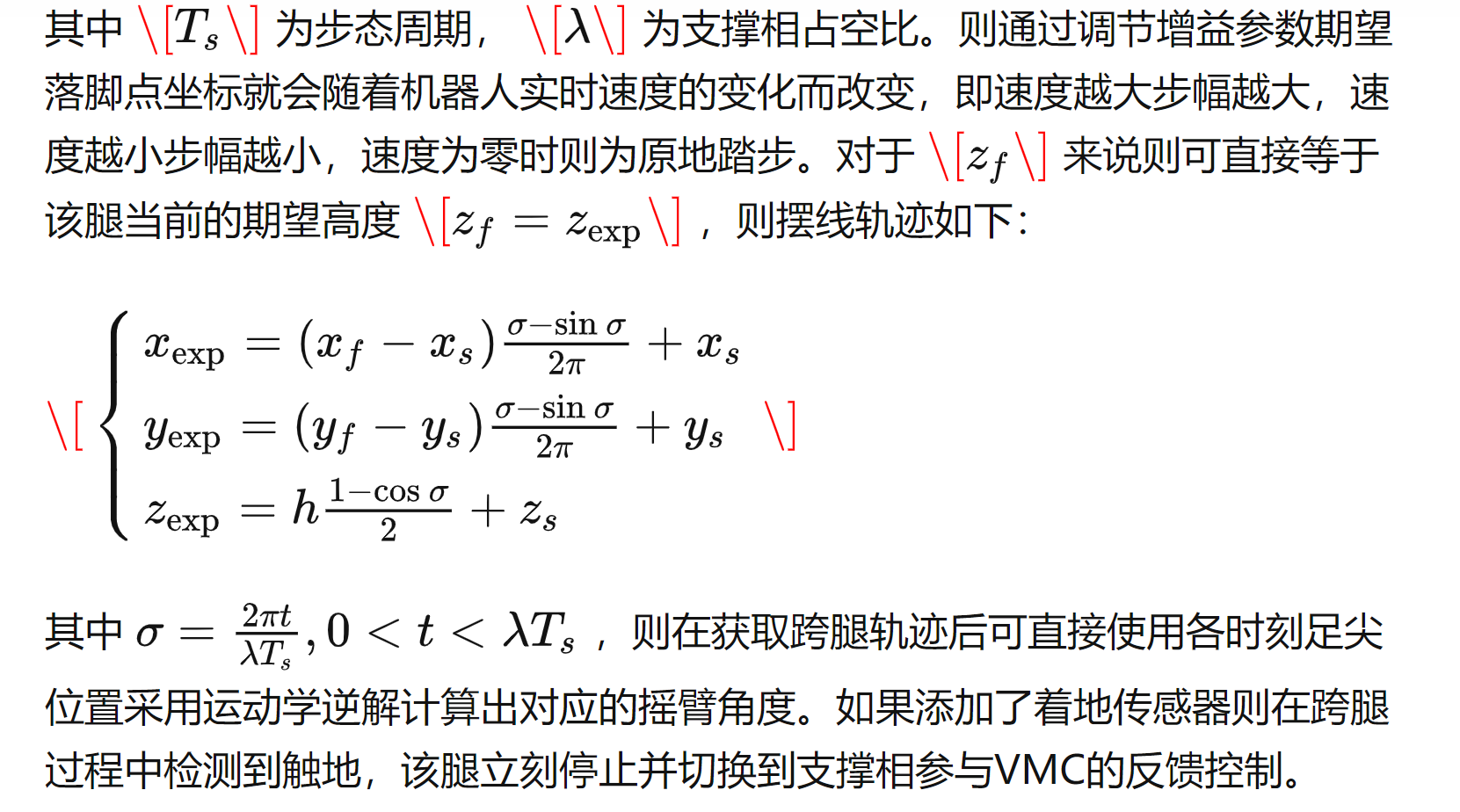
8自由度机械狗没有y方向的移动 x方向移动,分成摆动相和支撑相
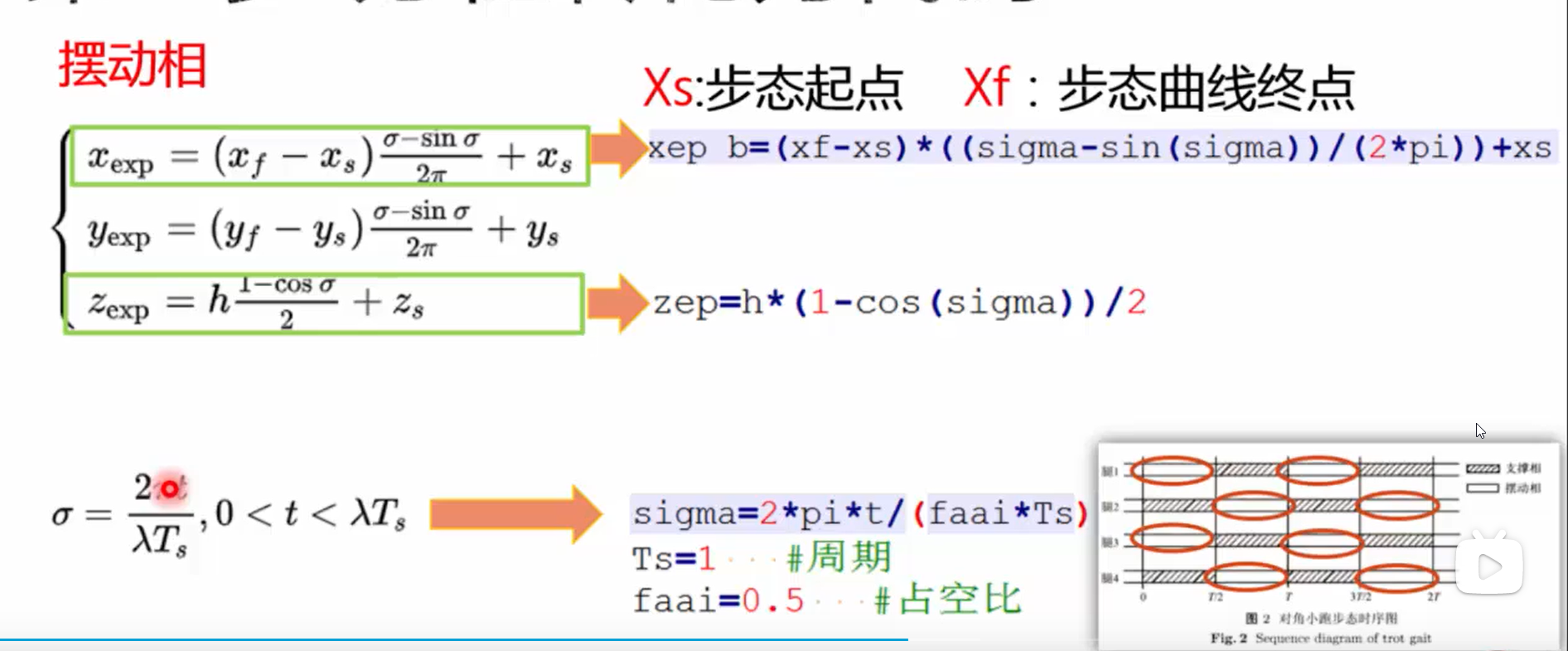
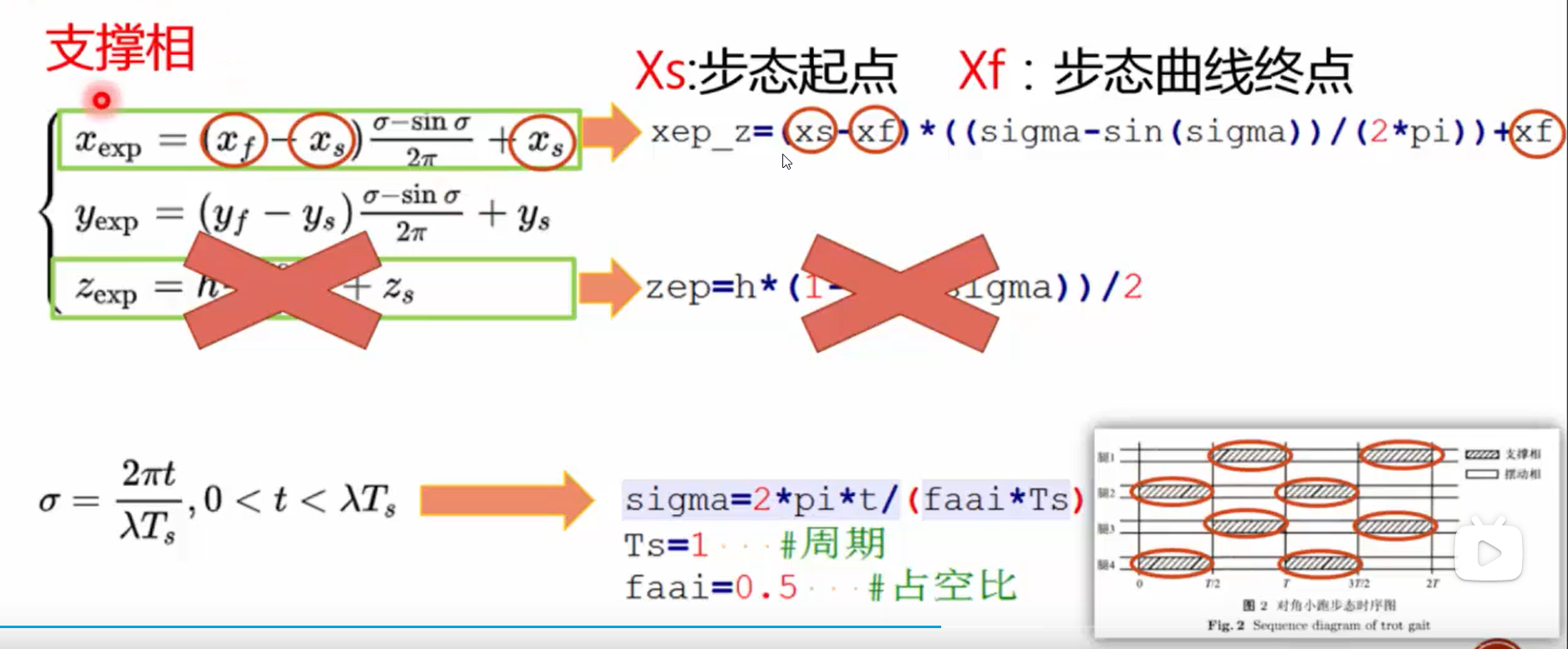
小跑步态规划实现
//周期 占空比 增加速度#define faai 0.5#define Ts 1#define speed 0.1#define ori_speed 0.025//步态规划void trot_plan(double t,double xs,double xf,double h,double r1,double r2,double r3,double r4,double x_pos[4],double y_pos[4]){if(t<=Ts*faai){sigma = (2*PI*t)/(faai*Ts);zep = h*(1-cos(sigma))/2;xep_b = (xf-xs)*((sigma-sin(sigma))/(2*PI))+xs;xep_z = (xs-xf)*((sigma-sin(sigma))/(2*PI))+xf;//y坐标值y_pos[0] = ges_y_1-zep;y_pos[1] = ges_y_2;y_pos[2] = ges_y_3;y_pos[3] = ges_y_4-zep;//x坐标值x_pos[0] = xep_b*r1;x_pos[1] = xep_z*r2;x_pos[2] = xep_z*r3;x_pos[3] = xep_b*r4;}else if((t>Ts*faai)&&(t<=Ts)){sigma = (2*PI*(t-Ts*faai))/(faai*Ts);zep = h*(1-cos(sigma))/2;xep_b = (xf-xs)*((sigma-sin(sigma))/(2*PI))+xs;xep_z = (xs-xf)*((sigma-sin(sigma))/(2*PI))+xf;//y坐标值y_pos[0] = ges_y_1;y_pos[1] = ges_y_2-zep;y_pos[2] = ges_y_3-zep;y_pos[3] = ges_y_4;//x坐标值x_pos[0] = xep_z*r1;x_pos[1] = xep_b*r2;x_pos[2] = xep_b*r3;x_pos[3] = xep_z*r4;}}

若有收获,就点个赞吧
0 人点赞
