给定四个狗腿的坐标,计算8个舵机转动角度 需要考虑左右腿的安装角度
左腿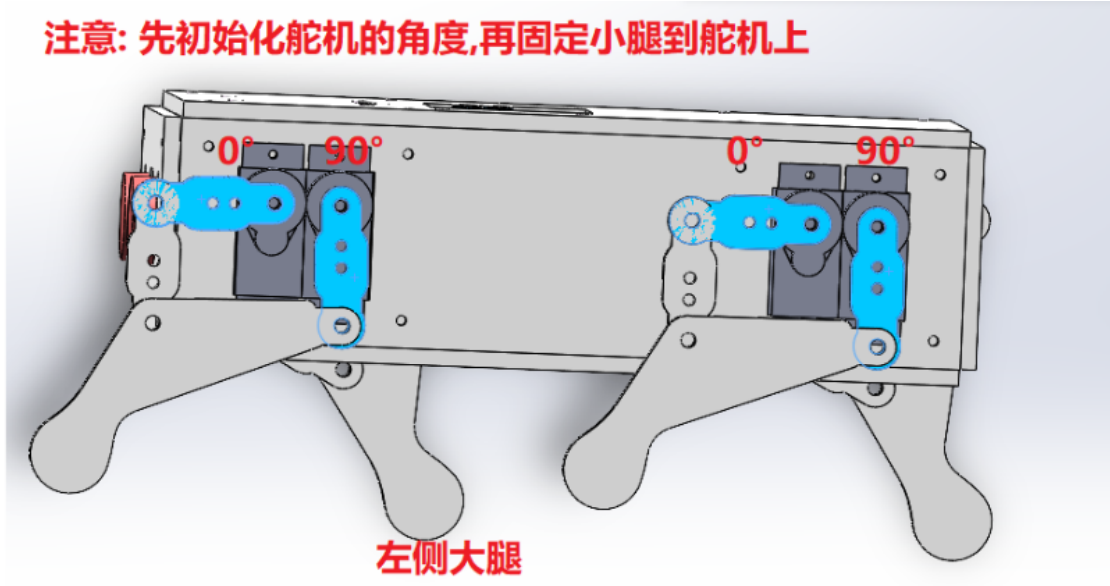
右腿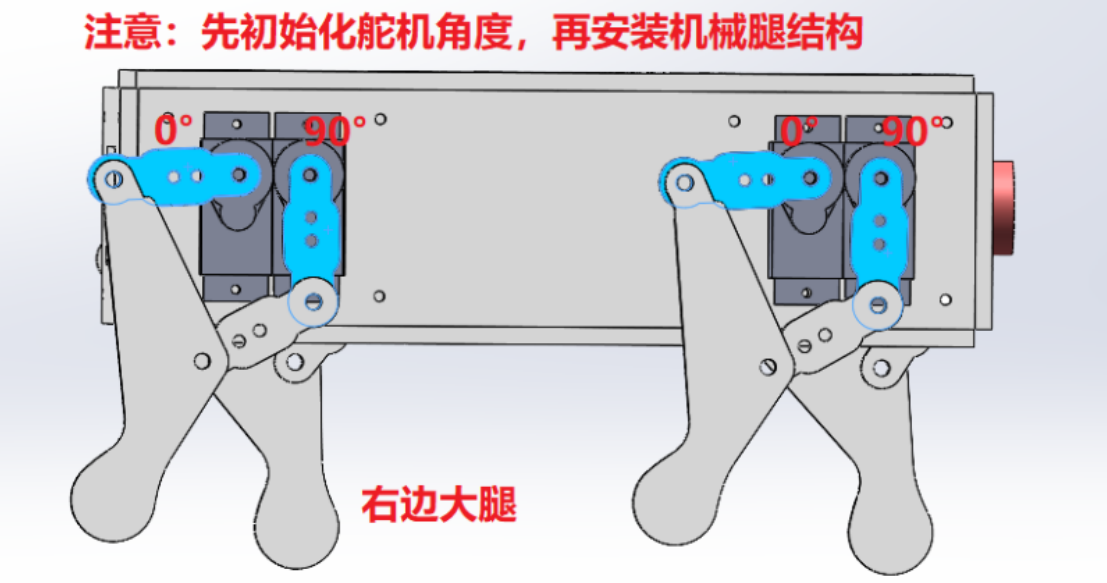
//特定位置的舵机角度void leg_inverse_angle(double rq_x,double rq_y,double rh_x,double rh_y,double lq_x,double lq_y,double lh_x,double lh_y,double steering_angles[8]){//右前leg_inverse(rq_x,rq_y,&alpha,&beta);steering_angles[0] = rad2deg(PI-beta);steering_angles[1] = rad2deg(alpha);//printf("dj1:%lf ,dj2:%lf\n",steering_angles[0],steering_angles[1]);//右后leg_inverse(rh_x,rh_y,&alpha,&beta);steering_angles[2] = rad2deg(PI-beta);steering_angles[3] = rad2deg(alpha);//printf("dj3:%lf ,dj4:%lf\n",steering_angles[2],steering_angles[3]);//左前leg_inverse(lq_x,lq_y,&alpha,&beta);steering_angles[4] = rad2deg(beta);steering_angles[5] = rad2deg(PI-alpha);//printf("dj5:%lf ,dj6:%lf\n",steering_angles[4],steering_angles[5]);//左后leg_inverse(lh_x,lh_y,&alpha,&beta);steering_angles[6] = rad2deg(beta);steering_angles[7] = rad2deg(PI-alpha);//printf("dj7:%lf ,dj8:%lf\n",steering_angles[6],steering_angles[7]);}
狗腿运动到指定的位置
//狗运动到指定的位置void dog_to_coord(double rq_x,double rq_y,double rh_x,double rh_y,double lq_x,double lq_y,double lh_x,double lh_y){leg_inverse_angle(rq_x, rq_y, rh_x, rh_y,lq_x, lq_y, lh_x, lh_y, steering_angles);bsp_pwm0_angle(steering_angles[0]);bsp_pwm1_angle(steering_angles[1]);bsp_pwm2_angle(steering_angles[2]);bsp_pwm3_angle(steering_angles[3]);bsp_pwm4_angle(steering_angles[4]);bsp_pwm5_angle(steering_angles[5]);bsp_pwm6_angle(steering_angles[6]);bsp_pwm7_angle(steering_angles[7]);}

若有收获,就点个赞吧
0 人点赞
