学习目标
驱动编写
定时器代码
#include "bsp_timer.h"#include <stdio.h>uint32_t timer_ms = 0;void bsp_timer_init(void){// 开启时钟rcu_periph_clock_enable(RCU_TIMER5);// 开启倍频rcu_timer_clock_prescaler_config(RCU_TIMER_PSC_MUL4);// 定义结构timer_parameter_struct timer_initpara;// 复位定时器timer_deinit(TIMER5);timer_struct_para_init(&timer_initpara);// 定时器配置timer_initpara.period = 1000 - 1; // 定时1mstimer_initpara.prescaler = 240 - 1;// 定时器初始化timer_init(TIMER5, &timer_initpara);// 配置中断优先级nvic_irq_enable(TIMER5_DAC_IRQn,1,1);// 使能中断. 更新事件timer_interrupt_enable(TIMER5,TIMER_INT_UP);// 使能定时器timer_enable(TIMER5);}void bsp_timer_open(void){// 清空计数器timer_counter_value_config(TIMER5,0);timer_ms = 0;timer_enable(TIMER5);}void bsp_timer_close(void){timer_disable(TIMER5);}void TIMER5_DAC_IRQHandler(void){static int i = 0;if( timer_interrupt_flag_get(TIMER5, TIMER_INT_UP) != RESET ){timer_ms++;timer_interrupt_flag_clear(TIMER5,TIMER_INT_UP);}}uint32_t bsp_timer_get(){uint32_t t = 0;t = timer_ms*1000;t += timer_counter_read(TIMER5);return t;}
超声波驱动
#ifndef __BSP_ultrasonic_H#define __BSP_ultrasonic_H#include "gd32f4xx.h"#include "systick.h"#include <stdint.h>void bsp_ultrasonic_init(void);float bsp_ultrasonic_get(void);#endif /* __BSP_LED_H */
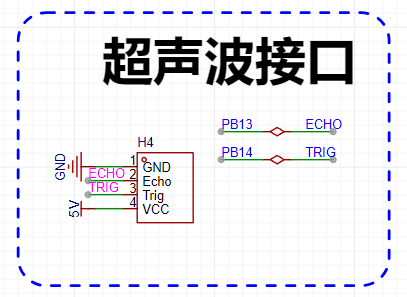
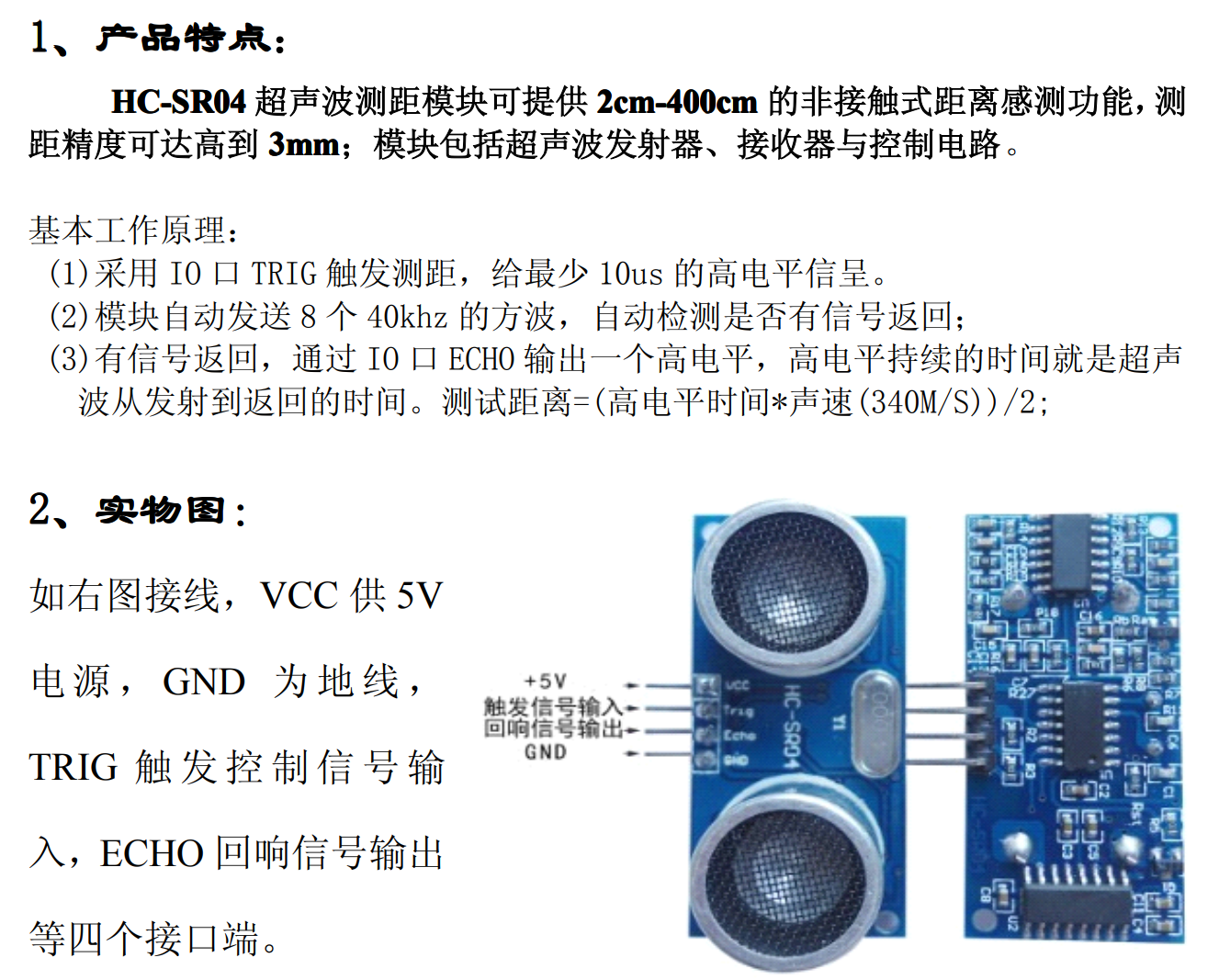
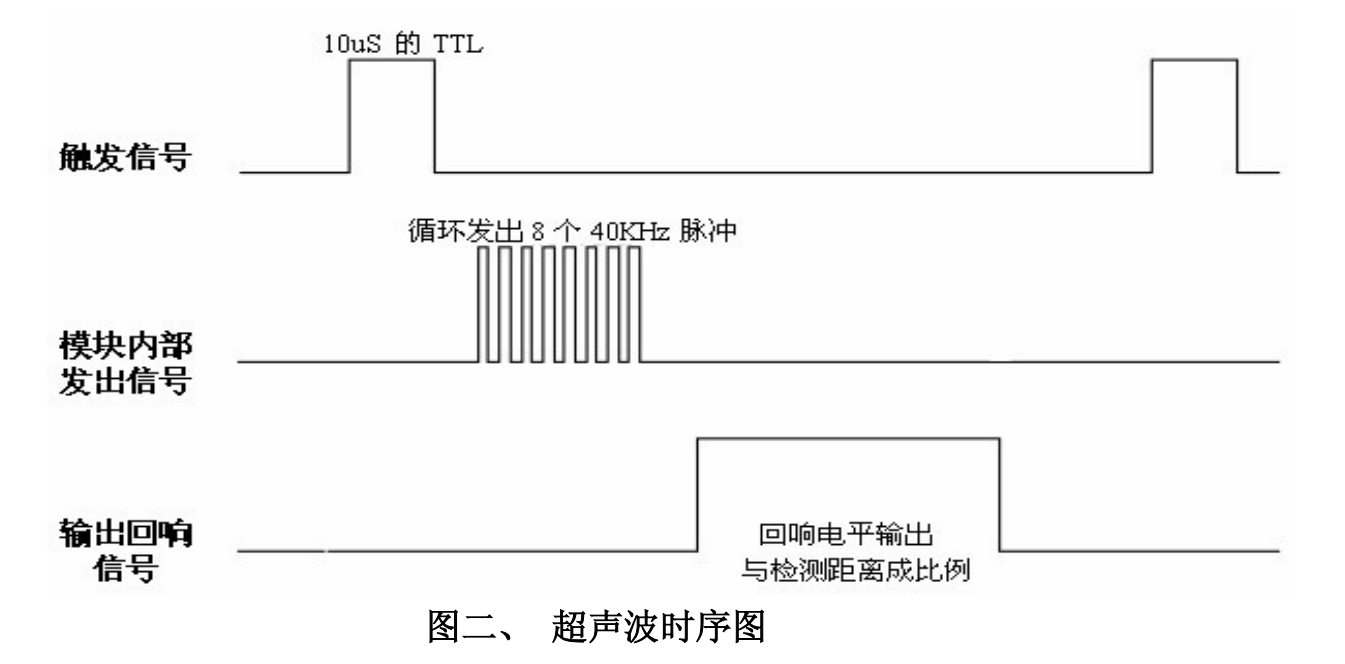
#include "bsp_ultrasonic.h"#include <stdio.h>#include "bsp_timer.h"// 定义TRIG#define RCU_TRIG RCU_GPIOB#define PORT_TRIG GPIOB#define GPIO_TRIG GPIO_PIN_14// 定义ECHO#define RCU_ECHO RCU_GPIOB#define PORT_ECHO GPIOB#define GPIO_ECHO GPIO_PIN_13void bsp_ultrasonic_gpio_init(){// 开启IO时钟rcu_periph_clock_enable(RCU_TRIG);rcu_periph_clock_enable(RCU_ECHO);// 设置TRIG引脚gpio_mode_set(PORT_TRIG,GPIO_MODE_OUTPUT,GPIO_PUPD_PULLUP,GPIO_TRIG);gpio_output_options_set(PORT_TRIG,GPIO_OTYPE_PP,GPIO_OSPEED_50MHZ,GPIO_TRIG);gpio_bit_write(PORT_TRIG,GPIO_TRIG,RESET);// 设置ECHO引脚gpio_mode_set(PORT_ECHO,GPIO_MODE_INPUT,GPIO_PUPD_NONE,GPIO_ECHO);gpio_bit_write(PORT_ECHO,GPIO_ECHO,RESET);}void bsp_ultrasonic_init(void){bsp_ultrasonic_gpio_init();}float bsp_ultrasonic_get(){// 连续测量5次 取平均值float distance = 0;uint8_t i = 0;uint8_t count = 5;while(i<count){// 先将trig 拉高 10us以上gpio_bit_write(PORT_TRIG,GPIO_TRIG,SET);// 持续10us以上delay_1us(20);// 再拉低,超声波就发射出去了,同时Echo引脚的电平又0变为1gpio_bit_write(PORT_TRIG,GPIO_TRIG,RESET);// 当超声波发送出去之后,ECHO由0变为1while(gpio_input_bit_get(PORT_ECHO,GPIO_ECHO) == RESET);// 发送成功bsp_timer_open();// 当超声波返回时, ECHO由1变为0while(gpio_input_bit_get(PORT_ECHO,GPIO_ECHO) == SET);// 关闭定时器bsp_timer_close();// 获取高电平的时长uint32_t time = bsp_timer_get(); // 单位us/** 计算距离* 声音在空气中的传播速度是343m/s* 34300cm/1000ms* 34300cm/1000 000us* 0.0343cm/us*/distance += 0.0343*time/2;// 延时10msdelay_1ms(10);i++;}return distance/5;}
练习题
- 实现超声波测距驱动

若有收获,就点个赞吧
0 人点赞
