- 10.1 Action通信10.1.1自定义 action文件
- 10.1.2 action通信实现A(C++)
- 需求:">需求:
- 10.1.3 actions通信实现B(python)
- 需求:">需求:
- 10.2动态参数
- 参数服务器的数据被修改时,如果节点不重新访问,那么就不能获取修改后的数据,例如在乌龟背景色修改的案例中,先启动乌龟显示节点,然后再修改参数服务器中关于背景色设置的参数,那么窗体的背景色是不会修改的,必须要重启乌龟显示节点才能生效。而一些特殊场景下,是要求要能做到动态获取的,也即,参数一旦修改,能够通知节点参数已经修改并读取修改后的数据,比如:">参数服务器的数据被修改时,如果节点不重新访问,那么就不能获取修改后的数据,例如在乌龟背景色修改的案例中,先启动乌龟显示节点,然后再修改参数服务器中关于背景色设置的参数,那么窗体的背景色是不会修改的,必须要重启乌龟显示节点才能生效。而一些特殊场景下,是要求要能做到动态获取的,也即,参数一旦修改,能够通知节点参数已经修改并读取修改后的数据,比如:
- 10.2.2动态参数服务A(C++)
- 需求:">需求:
- 需求:">102.3动态参数服务端B(python).需求:
- 10.3 pluginlib
- pluginlib直译是插件库,所谓插件字面意思就是可插拔的组件,比如:以计算机为例,可以通过USB接口自由插拔的键盘、鼠标、U盘…都可以看作是插件实现,其基本原理就是通过规范化的USB接口协议实现计算机与USB设备的自由组合。同理,在软件编程中,插件是一种遵循一定规范的应用程序接口编写出来的程序,插件程序依赖于某个应用程序,且应用程序可以与不同的插件程序自由组合。在ROS中,也会经常使用到插件,场景如下:">pluginlib直译是插件库,所谓插件字面意思就是可插拔的组件,比如:以计算机为例,可以通过USB接口自由插拔的键盘、鼠标、U盘…都可以看作是插件实现,其基本原理就是通过规范化的USB接口协议实现计算机与USB设备的自由组合。同理,在软件编程中,插件是一种遵循一定规范的应用程序接口编写出来的程序,插件程序依赖于某个应用程序,且应用程序可以与不同的插件程序自由组合。在ROS中,也会经常使用到插件,场景如下:
- 至此,可以调用 catkin_make 编译,编译完成后,在工作空间/devel/lib目录下,会生成相关的 .so 文件。">至此,可以调用 catkin_make 编译,编译完成后,在工作空间/devel/lib目录下,会生成相关的 .so 文件。
- 标签
的名称应与基类所属的功能包名称一致,plugin属性值为上一步中创建的xml文件。">标签 的名称应与基类所属的功能包名称一致,plugin属性值为上一步中创建的xml文件。 - 10.4 notelet
- ROS通信是基于Node(节点)的,Node使用方便、易于扩展,可以满足ROS中大多数应用场景,但是也存在一些局限性,由于一个Node启动之后独占一根进程,不同Node之间数据交互其实是不同进程之间的数据交互,当传输类似于图片、点云的大容量数据时,会出现延时与阻塞的情况,比如:">ROS通信是基于Node(节点)的,Node使用方便、易于扩展,可以满足ROS中大多数应用场景,但是也存在一些局限性,由于一个Node启动之后独占一根进程,不同Node之间数据交互其实是不同进程之间的数据交互,当传输类似于图片、点云的大容量数据时,会出现延时与阻塞的情况,比如:
- 10.4.1使用演示
- 在ROS中内置了nodelet案例,我们先以该案例演示nodelet的基本使用语法,基本流程如下:">在ROS中内置了nodelet案例,我们先以该案例演示nodelet的基本使用语法,基本流程如下:
- 10.4.2 notelet实现
- nodelet本质也是插件,实现流程与插件实现流程类似,并且更为简单,不需要自定义接口,也不需要使用类加载器加载插件类。">nodelet本质也是插件,实现流程与插件实现流程类似,并且更为简单,不需要自定义接口,也不需要使用类加载器加载插件类。
- 编译后,会在 工作空间/devel/lib/先生成文件: libmynodeletlib.so。">编译后,会在 工作空间/devel/lib/先生成文件: libmynodeletlib.so。
- 运行launch文件,可以参考上一节方式向 p1发布数据,并订阅p2输出的数据,最终运行结果也与上一节类似。">运行launch文件,可以参考上一节方式向 p1发布数据,并订阅p2输出的数据,最终运行结果也与上一节类似。
- 10.5本章小结
- action通信;
- 动态参数;
- pluginlib;
- nodelet。
- 了解服务通信应用的局限性(action的应用场景),熟练掌握action的理论模型与实现流程;
- 了解参数服务器应用的局限性(动态配置参数的应用场景),熟练掌握动态配置参数的实现流程;
- 了解插件的概念以及使用流程;
- 了解nodelet的应用场景以及使用流程。
- 关于action通信,我们先从之前导航中的应用场景开始介绍,描述如下:
10.1 Action通信10.1.1自定义 action文件
概念
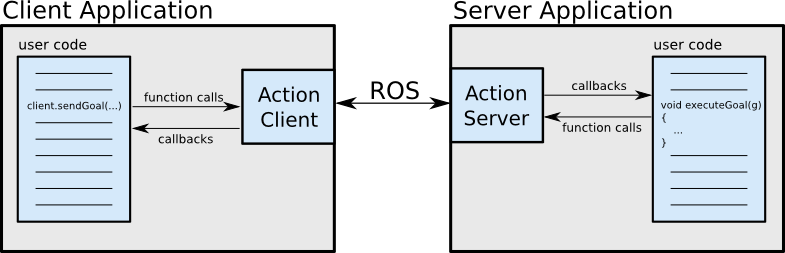
在ROS中提供了actionlib功能包集,用于实现 action 通信。action 是一种类似于服务通信的实现,其实现模型也包含请求和响应,但是不同的是,在请求和响应的过程中,服务端还可以连续的反馈当前任务进度,客户端可以接收连续反馈并且还可以取消任务。action结构图解:
action通信接口图解:
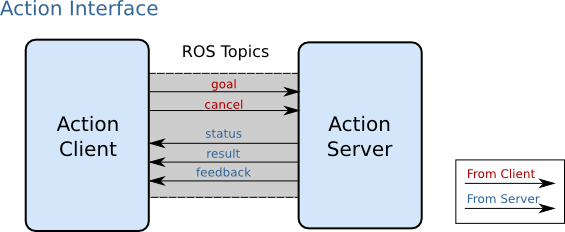
- goal:目标任务;
- cacel:取消任务;
- status:服务端状态;
- result:最终执行结果(只会发布一次);
- feedback:连续反馈(可以发布多次)。
作用
一般适用于耗时的请求响应场景,用以获取连续的状态反馈。案例
创建两个ROS 节点,服务器和客户端,客户端可以向服务器发送目标数据N(一个整型数据)服务器会计算 1 到 N 之间所有整数的和,这是一个循环累加的过程,返回给客户端,这是基于请求响应模式的,又已知服务器从接收到请求到产生响应是一个耗时操作,每累加一次耗时0.1s,为了良好的用户体验,需要服务器在计算过程中,每累加一次,就给客户端响应一次百分比格式的执行进度,使用 action实现。
另请参考:
10.1.2 action通信实现A(C++)
需求:
创建两个ROS 节点,服务器和客户端,客户端可以向服务器发送目标数据N(一个整型数据)服务器会计算 1 到 N 之间所有整数的和,这是一个循环累加的过程,返回给客户端,这是基于请求响应模式的,又已知服务器从接收到请求到产生响应是一个耗时操作,每累加一次耗时0.1s,为了良好的用户体验,需要服务器在计算过程中,每累加一次,就给客户端响应一次百分比格式的执行进度,使用 action实现。流程:
- 编写action服务端实现;
- 编写action客户端实现;
- 编辑CMakeLists.txt;
- 编译并执行。
0.vscode配置
需要像之前自定义 msg 实现一样配置c_cpp_properies.json 文件,如果以前已经配置且没有变更工作空间,可以忽略,如果需要配置,配置方式与之前相同:
{"configurations": [{"browse": {"databaseFilename": "","limitSymbolsToIncludedHeaders": true},"includePath": ["/opt/ros/noetic/include/**","/usr/include/**","/xxx/yyy工作空间/devel/include/**" //配置 head 文件的路径],"name": "ROS","intelliSenseMode": "gcc-x64","compilerPath": "/usr/bin/gcc","cStandard": "c11","cppStandard": "c++17"}],"version": 4}
1.服务端
#include "ros/ros.h"#include "actionlib/server/simple_action_server.h"#include "demo01_action/AddIntsAction.h"/*需求:创建两个ROS节点,服务器和客户端,客户端可以向服务器发送目标数据N(一个整型数据)服务器会计算1到N之间所有整数的和,这是一个循环累加的过程,返回给客户端,这是基于请求响应模式的,又已知服务器从接收到请求到产生响应是一个耗时操作,每累加一次耗时0.1s,为了良好的用户体验,需要服务器在计算过程中,每累加一次,就给客户端响应一次百分比格式的执行进度,使用action实现。流程:1.包含头文件;2.初始化ROS节点;3.创建NodeHandle;4.创建action服务对象;5.处理请求,产生反馈与响应;6.spin().*/typedef actionlib::SimpleActionServer<demo01_action::AddIntsAction> Server;void cb(const demo01_action::AddIntsGoalConstPtr &goal,Server* server){//获取目标值int num = goal->num;ROS_INFO("目标值:%d",num);//累加并响应连续反馈int result = 0;demo01_action::AddIntsFeedback feedback;//连续反馈ros::Rate rate(10);//通过频率设置休眠时间for (int i = 1; i <= num; i++){result += i;//组织连续数据并发布feedback.progress_bar = i / (double)num;server->publishFeedback(feedback);rate.sleep();}//设置最终结果demo01_action::AddIntsResult r;r.result = result;server->setSucceeded(r);ROS_INFO("最终结果:%d",r.result);}int main(int argc, char *argv[]){setlocale(LC_ALL,"");ROS_INFO("action服务端实现");// 2.初始化ROS节点;ros::init(argc,argv,"AddInts_server");// 3.创建NodeHandle;ros::NodeHandle nh;// 4.创建action服务对象;/*SimpleActionServer(ros::NodeHandle n,std::string name,boost::function<void (const demo01_action::AddIntsGoalConstPtr &)> execute_callback,bool auto_start)*/// actionlib::SimpleActionServer<demo01_action::AddIntsAction> server(....);Server server(nh,"addInts",boost::bind(&cb,_1,&server),false);server.start();// 5.处理请求,产生反馈与响应;// 6.spin().ros::spin();return 0;}
PS:
可以先配置CMakeLists.tx文件并启动上述action服务端,然后通过 rostopic 查看话题,向action相关话题发送消息,或订阅action相关话题的消息。2.客户端
#include "ros/ros.h"#include "actionlib/client/simple_action_client.h"#include "demo01_action/AddIntsAction.h"/*需求:创建两个ROS节点,服务器和客户端,客户端可以向服务器发送目标数据N(一个整型数据)服务器会计算1到N之间所有整数的和,这是一个循环累加的过程,返回给客户端,这是基于请求响应模式的,又已知服务器从接收到请求到产生响应是一个耗时操作,每累加一次耗时0.1s,为了良好的用户体验,需要服务器在计算过程中,每累加一次,就给客户端响应一次百分比格式的执行进度,使用action实现。流程:1.包含头文件;2.初始化ROS节点;3.创建NodeHandle;4.创建action客户端对象;5.发送目标,处理反馈以及最终结果;6.spin().*/typedef actionlib::SimpleActionClient<demo01_action::AddIntsAction> Client;//处理最终结果void done_cb(const actionlib::SimpleClientGoalState &state, const demo01_action::AddIntsResultConstPtr &result){if (state.state_ == state.SUCCEEDED){ROS_INFO("最终结果:%d",result->result);} else {ROS_INFO("任务失败!");}}//服务已经激活void active_cb(){ROS_INFO("服务已经被激活....");}//处理连续反馈void feedback_cb(const demo01_action::AddIntsFeedbackConstPtr &feedback){ROS_INFO("当前进度:%.2f",feedback->progress_bar);}int main(int argc, char *argv[]){setlocale(LC_ALL,"");// 2.初始化ROS节点;ros::init(argc,argv,"AddInts_client");// 3.创建NodeHandle;ros::NodeHandle nh;// 4.创建action客户端对象;// SimpleActionClient(ros::NodeHandle & n, const std::string & name, bool spin_thread = true)// actionlib::SimpleActionClient<demo01_action::AddIntsAction> client(nh,"addInts");Client client(nh,"addInts",true);//等待服务启动client.waitForServer();// 5.发送目标,处理反馈以及最终结果;/*void sendGoal(const demo01_action::AddIntsGoal &goal,boost::function<void (const actionlib::SimpleClientGoalState &state, const demo01_action::AddIntsResultConstPtr &result)> done_cb,boost::function<void ()> active_cb,boost::function<void (const demo01_action::AddIntsFeedbackConstPtr &feedback)> feedback_cb)*/demo01_action::AddIntsGoal goal;goal.num = 10;client.sendGoal(goal,&done_cb,&active_cb,&feedback_cb);// 6.spin().ros::spin();return 0;}
PS:等待服务启动,只可以使用client.waitForServer();,之前服务中等待启动的另一种方式ros::service::waitForService(“addInts”);不适用
3.编译配置文件
add_executable(action01_server src/action01_server.cpp)add_executable(action02_client src/action02_client.cpp)...add_dependencies(action01_server ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})add_dependencies(action02_client ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})...target_link_libraries(action01_server${catkin_LIBRARIES})target_link_libraries(action02_client${catkin_LIBRARIES})
4.执行
首先启动 roscore,然后分别启动action服务端与action客户端,最终运行结果与案例类似。10.1.3 actions通信实现B(python)
需求:
创建两个ROS 节点,服务器和客户端,客户端可以向服务器发送目标数据N(一个整型数据)服务器会计算 1 到 N 之间所有整数的和,这是一个循环累加的过程,返回给客户端,这是基于请求响应模式的,又已知服务器从接收到请求到产生响应是一个耗时操作,每累加一次耗时0.1s,为了良好的用户体验,需要服务器在计算过程中,每累加一次,就给客户端响应一次百分比格式的执行进度,使用 action实现。流程:
- 编写action服务端实现;
- 编写action客户端实现;
- 编辑CMakeLists.txt;
- 编译并执行。
0.vscode配置
需要像之前自定义 msg 实现一样配置settings.json 文件,如果以前已经配置且没有变更工作空间,可以忽略,如果需要配置,配置方式与之前相同:
{"python.autoComplete.extraPaths": ["/opt/ros/noetic/lib/python3/dist-packages","/xxx/yyy工作空间/devel/lib/python3/dist-packages"]}
1.服务端
#! /usr/bin/env pythonimport rospyimport actionlibfrom demo01_action.msg import *"""需求:创建两个ROS 节点,服务器和客户端,客户端可以向服务器发送目标数据N(一个整型数据)服务器会计算 1 到 N 之间所有整数的和,这是一个循环累加的过程,返回给客户端,这是基于请求响应模式的,又已知服务器从接收到请求到产生响应是一个耗时操作,每累加一次耗时0.1s,为了良好的用户体验,需要服务器在计算过程中,每累加一次,就给客户端响应一次百分比格式的执行进度,使用 action实现。流程:1.导包2.初始化 ROS 节点3.使用类封装,然后创建对象4.创建服务器对象5.处理请求数据产生响应结果,中间还要连续反馈6.spin"""class MyActionServer:def __init__(self):#SimpleActionServer(name, ActionSpec, execute_cb=None, auto_start=True)self.server = actionlib.SimpleActionServer("addInts",AddIntsAction,self.cb,False)self.server.start()rospy.loginfo("服务端启动")def cb(self,goal):rospy.loginfo("服务端处理请求:")#1.解析目标值num = goal.num#2.循环累加,连续反馈rate = rospy.Rate(10)sum = 0for i in range(1,num + 1):# 累加sum = sum + i# 计算进度并连续反馈feedBack = i / numrospy.loginfo("当前进度:%.2f",feedBack)feedBack_obj = AddIntsFeedback()feedBack_obj.progress_bar = feedBackself.server.publish_feedback(feedBack_obj)rate.sleep()#3.响应最终结果result = AddIntsResult()result.result = sumself.server.set_succeeded(result)rospy.loginfo("响应结果:%d",sum)if __name__ == "__main__":rospy.init_node("action_server_p")server = MyActionServer()rospy.spin()
PS:
可以先配置CMakeLists.tx文件并启动上述action服务端,然后通过 rostopic 查看话题,向action相关话题发送消息,或订阅action相关话题的消息。2.客户端
#! /usr/bin/env pythonimport rospyimport actionlibfrom demo01_action.msg import *"""需求:创建两个ROS 节点,服务器和客户端,客户端可以向服务器发送目标数据N(一个整型数据)服务器会计算 1 到 N 之间所有整数的和,这是一个循环累加的过程,返回给客户端,这是基于请求响应模式的,又已知服务器从接收到请求到产生响应是一个耗时操作,每累加一次耗时0.1s,为了良好的用户体验,需要服务器在计算过程中,每累加一次,就给客户端响应一次百分比格式的执行进度,使用 action实现。流程:1.导包2.初始化 ROS 节点3.创建 action Client 对象4.等待服务5.组织目标对象并发送6.编写回调, 激活、连续反馈、最终响应7.spin"""def done_cb(state,result):if state == actionlib.GoalStatus.SUCCEEDED:rospy.loginfo("响应结果:%d",result.result)def active_cb():rospy.loginfo("服务被激活....")def fb_cb(fb):rospy.loginfo("当前进度:%.2f",fb.progress_bar)if __name__ == "__main__":# 2.初始化 ROS 节点rospy.init_node("action_client_p")# 3.创建 action Client 对象client = actionlib.SimpleActionClient("addInts",AddIntsAction)# 4.等待服务client.wait_for_server()# 5.组织目标对象并发送goal_obj = AddIntsGoal()goal_obj.num = 10client.send_goal(goal_obj,done_cb,active_cb,fb_cb)# 6.编写回调, 激活、连续反馈、最终响应# 7.spinrospy.spin()
3.编辑配置文件
先为 Python 文件添加可执行权限:chmod +x *.py
catkin_install_python(PROGRAMSscripts/action01_server_p.pyscripts/action02_client_p.pyDESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION})
4.执行
首先启动 roscore,然后分别启动action服务端与action客户端,最终运行结果与案例类似。10.2动态参数
参数服务器的数据被修改时,如果节点不重新访问,那么就不能获取修改后的数据,例如在乌龟背景色修改的案例中,先启动乌龟显示节点,然后再修改参数服务器中关于背景色设置的参数,那么窗体的背景色是不会修改的,必须要重启乌龟显示节点才能生效。而一些特殊场景下,是要求要能做到动态获取的,也即,参数一旦修改,能够通知节点参数已经修改并读取修改后的数据,比如:
机器人调试时,需要修改机器人轮廓信息(长宽高)、传感器位姿信息….,如果这些信息存储在参数服务器中,那么意味着需要重启节点,才能使更新设置生效,但是希望修改完毕之后,某些节点能够即时更新这些参数信息。 在ROS中针对这种场景已经给出的解决方案: dynamic reconfigure 动态配置参数。 动态配置参数,之所以能够实现即时更新,因为被设计成 CS 架构,客户端修改参数就是向服务器发送请求,服务器接收到请求之后,读取修改后的是参数。概念
一种可以在运行时更新参数而无需重启节点的参数配置策略。作用
主要应用于需要动态更新参数的场景,比如参数调试、功能切换等。典型应用:导航时参数的动态调试。案例
编写两个节点,一个节点可以动态修改参数,另一个节点时时解析修改后的数据。 —-
另请参考:
+ http://wiki.ros.org/dynamic_reconfigure
+ http://wiki.ros.org/dynamic_reconfigure/Tutorials
## 10.2.1动态参数喜户端
## 需求:
编写两个节点,一个节点可以动态修改参数,另一个节点时时解析修改后的数据。
—-
另请参考:
+ http://wiki.ros.org/dynamic_reconfigure
+ http://wiki.ros.org/dynamic_reconfigure/Tutorials
## 10.2.1动态参数喜户端
## 需求:
编写两个节点,一个节点可以动态修改参数,另一个节点时时解析修改后的数据。
客户端实现流程:
- 新建并编辑 .cfg 文件;
- 编辑CMakeLists.txt;
- 编译。
1.新建功能包
新建功能包,添加依赖:roscpp rospy std_msgs dynamic_reconfigure。2.添加.cfg文件
新建 cfg 文件夹,添加 xxx.cfg 文件(并添加可执行权限),cfg 文件其实就是一个 python 文件,用于生成参数修改的客户端(GUI)。chmod +x xxx.cfg添加权限
#! /usr/bin/env python"""4生成动态参数 int,double,bool,string,列表5实现流程:6 1.导包7 2.创建生成器8 3.向生成器添加若干参数9 4.生成中间文件并退出10"""# 1.导包from dynamic_reconfigure.parameter_generator_catkin import *PACKAGE = "demo02_dr"# 2.创建生成器gen = ParameterGenerator()# 3.向生成器添加若干参数#add(name, paramtype, level, description, default=None, min=None, max=None, edit_method="")gen.add("int_param",int_t,0,"整型参数",50,0,100)gen.add("double_param",double_t,0,"浮点参数",1.57,0,3.14)gen.add("string_param",str_t,0,"字符串参数","hello world ")gen.add("bool_param",bool_t,0,"bool参数",True)many_enum = gen.enum([gen.const("small",int_t,0,"a small size"),gen.const("mediun",int_t,1,"a medium size"),gen.const("big",int_t,2,"a big size")],"a car size set")gen.add("list_param",int_t,0,"列表参数",0,0,2, edit_method=many_enum)# 4.生成中间文件并退出exit(gen.generate(PACKAGE,"dr_node","dr"))
3.配置 CMakeLists.txt
generate_dynamic_reconfigure_options(cfg/mycar.cfg)
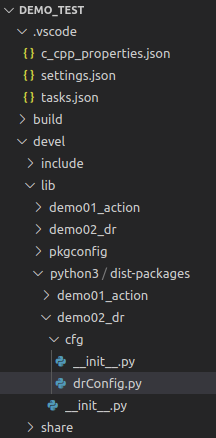
4.编译
编译后会生成中间文件 C++ 需要调用的头文件:
10.2.2动态参数服务A(C++)
需求:
编写两个节点,一个节点可以动态修改参数,另一个节点时时解析修改后的数据。服务端实现流程:
- 新建并编辑 c++ 文件;
- 编辑CMakeLists.txt;
- 编译并执行。
0.vscode配置
需要像之前自定义 msg 实现一样配置settings.json 文件,如果以前已经配置且没有变更工作空间,可以忽略,如果需要配置,配置方式与之前相同:
{"configurations": [{"browse": {"databaseFilename": "","limitSymbolsToIncludedHeaders": true},"includePath": ["/opt/ros/noetic/include/**","/usr/include/**","/xxx/yyy工作空间/devel/include/**" //配置 head 文件的路径],"name": "ROS","intelliSenseMode": "gcc-x64","compilerPath": "/usr/bin/gcc","cStandard": "c11","cppStandard": "c++17"}],"version": 4}
1.服务器代码实现
新建cpp文件,内容如下:
#include "ros/ros.h"#include "dynamic_reconfigure/server.h"#include "demo02_dr/drConfig.h"/*动态参数服务端: 参数被修改时直接打印实现流程:1.包含头文件2.初始化 ros 节点3.创建服务器对象4.创建回调对象(使用回调函数,打印修改后的参数)5.服务器对象调用回调对象6.spin()*/void cb(demo02_dr::drConfig& config, uint32_t level){ROS_INFO("动态参数解析数据:%d,%.2f,%d,%s,%d",config.int_param,config.double_param,config.bool_param,config.string_param.c_str(),config.list_param);}int main(int argc, char *argv[]){setlocale(LC_ALL,"");// 2.初始化 ros 节点ros::init(argc,argv,"dr");// 3.创建服务器对象dynamic_reconfigure::Server<demo02_dr::drConfig> server;// 4.创建回调对象(使用回调函数,打印修改后的参数)dynamic_reconfigure::Server<demo02_dr::drConfig>::CallbackType cbType;cbType = boost::bind(&cb,_1,_2);// 5.服务器对象调用回调对象server.setCallback(cbType);// 6.spin()ros::spin();return 0;}
2.编译配置文件
add_executable(demo01_dr_server src/demo01_dr_server.cpp)...add_dependencies(demo01_dr_server ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})...target_link_libraries(demo01_dr_server${catkin_LIBRARIES})
3.执行
先启动roscore 启动服务端:rosrun 功能包 xxxx 启动客户端:rosrun rqt_gui rqt_gui -s rqt_reconfigure或rosrun rqt_reconfigure rqt_reconfigure 最终可以通过客户端提供的界面修改数据,并且修改完毕后,服务端会即时输出修改后的结果,最终运行结果与示例类似。PS:ROS版本较新时,可能没有提供客户端相关的功能包导致rosrun rqt_reconfigure rqt_reconfigure调用会抛出异常。
102.3动态参数服务端B(python).需求:
编写两个节点,一个节点可以动态修改参数,另一个节点时时解析修改后的数据。服务端实现流程:
- 新建并编辑 Python 文件;
- 编辑CMakeLists.txt;
- 编译并执行。
0.vscode配置
需要像之前自定义 msg 实现一样配置settings.json 文件,如果以前已经配置且没有变更工作空间,可以忽略,如果需要配置,配置方式与之前相同:
{"python.autoComplete.extraPaths": ["/opt/ros/noetic/lib/python3/dist-packages","/xxx/yyy工作空间/devel/lib/python3/dist-packages"]}
1.服务器代码实现
新建python文件,内容如下:
#! /usr/bin/env pythonimport rospyfrom dynamic_reconfigure.server import Serverfrom demo02_dr.cfg import drConfig"""动态参数服务端: 参数被修改时直接打印实现流程:1.导包2.初始化 ros 节点3.创建服务对象4.回调函数处理5.spin"""# 回调函数def cb(config,level):rospy.loginfo("python 动态参数服务解析:%d,%.2f,%d,%s,%d",config.int_param,config.double_param,config.bool_param,config.string_param,config.list_param)return configif __name__ == "__main__":# 2.初始化 ros 节点rospy.init_node("dr_p")# 3.创建服务对象server = Server(drConfig,cb)# 4.回调函数处理# 5.spinrospy.spin()
2.编辑配置文件
先为 Python 文件添加可执行权限:chmod +x *.py
catkin_install_python(PROGRAMSscripts/demo01_dr_server_p.pyDESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION})
3.执行
先启动roscore 启动服务端:rosrun 功能包 xxxx.py 启动客户端:rosrun rqt_gui rqt_gui -s rqt_reconfigure或rosrun rqt_reconfigure rqt_reconfigure 最终可以通过客户端提供的界面修改数据,并且修改完毕后,服务端会即时输出修改后的结果,最终运行结果与示例类似。PS:ROS版本较新时,可能没有提供客户端相关的功能包导致rosrun rqt_reconfigure rqt_reconfigure调用会抛出异常。
10.3 pluginlib
pluginlib直译是插件库,所谓插件字面意思就是可插拔的组件,比如:以计算机为例,可以通过USB接口自由插拔的键盘、鼠标、U盘…都可以看作是插件实现,其基本原理就是通过规范化的USB接口协议实现计算机与USB设备的自由组合。同理,在软件编程中,插件是一种遵循一定规范的应用程序接口编写出来的程序,插件程序依赖于某个应用程序,且应用程序可以与不同的插件程序自由组合。在ROS中,也会经常使用到插件,场景如下:
1.导航插件:在导航中,涉及到路径规划模块,路径规划算法有多种,也可以自实现,导航应用时,可能需要测试不同算法的优劣以选择更合适的实现,这种场景下,ROS中就是通过插件的方式来实现不同算法的灵活切换的。 2.rviz插件:在rviz中已经提供了丰富的功能实现,但是即便如此,特定场景下,开发者可能需要实现某些定制化功能并集成到rviz中,这一集成过程也是基于插件的。概念
pluginlib是一个c++库, 用来从一个ROS功能包中加载和卸载插件(plugin)。插件是指从运行时库中动态加载的类。通过使用Pluginlib,不必将某个应用程序显式地链接到包含某个类的库,Pluginlib可以随时打开包含类的库,而不需要应用程序事先知道包含类定义的库或者头文件。
作用
- 结构清晰;
- 低耦合,易修改,可维护性强;
- 可移植性强,更具复用性;
- 结构容易调整,插件可以自由增减;
另请参考:
- http://wiki.ros.org/pluginlib
- http://wiki.ros.org/pluginlib/Tutorials/Writing%20and%20Using%20a%20Simple%20Plugin
10.3.1 pluginlint使用
需求:
以插件的方式实现正多边形的相关计算。实现流程:
- 准备;
- 创建基类;
- 创建插件类;
- 注册插件;
- 构建插件库;
- 使插件可用于ROS工具链; - 配置xml - 导出插件
- 使用插件;
- 执行。
1.准备
创建功能包xxx导入依赖: roscpp pluginlib。 在 VSCode中需要配置 .vascode/c_cpp_properties.json文件中关于 includepath 选项的设置。
{"configurations": [{"browse": {"databaseFilename": "","limitSymbolsToIncludedHeaders": true},"includePath": ["/opt/ros/noetic/include/**","/usr/include/**","/.../yyy工作空间/功能包/include/**" //配置 head 文件的路径],"name": "ROS","intelliSenseMode": "gcc-x64","compilerPath": "/usr/bin/gcc","cStandard": "c11","cppStandard": "c++17"}],"version": 4}
2.创建基类
在 xxx/include/xxx下新建C++头文件: polygon_base.h,所有的插件类都需要继承此基类,内容如下:
#ifndef XXX_POLYGON_BASE_H_#define XXX_POLYGON_BASE_H_namespace polygon_base{class RegularPolygon{public:virtual void initialize(double side_length) = 0;virtual double area() = 0;virtual ~RegularPolygon(){}protected:RegularPolygon(){}};};#endif
PS:基类必须提供无参构造函数,所以关于多边形的边长没有通过构造函数而是通过单独编写的initialize函数传参。
3.创建插件
在 xxx/include/xxx下新建C++头文件:polygon_plugins.h,内容如下:该文件中创建了正方形与三角形两个衍生类继承基类。
#ifndef XXX_POLYGON_PLUGINS_H_#define XXX_POLYGON_PLUGINS_H_#include <xxx/polygon_base.h>#include <cmath>namespace polygon_plugins{class Triangle : public polygon_base::RegularPolygon{public:Triangle(){}void initialize(double side_length){side_length_ = side_length;}double area(){return 0.5 * side_length_ * getHeight();}double getHeight(){return sqrt((side_length_ * side_length_) - ((side_length_ / 2) * (side_length_ / 2)));}private:double side_length_;};class Square : public polygon_base::RegularPolygon{public:Square(){}void initialize(double side_length){side_length_ = side_length;}double area(){return side_length_ * side_length_;}private:double side_length_;};};#endif
4.注册插件
在 src 目录下新建 polygon_plugins.cpp 文件,内容如下:该文件会将两个衍生类注册为插件。
//pluginlib 宏,可以注册插件类#include <pluginlib/class_list_macros.h>#include <xxx/polygon_base.h>#include <xxx/polygon_plugins.h>//参数1:衍生类 参数2:基类PLUGINLIB_EXPORT_CLASS(polygon_plugins::Triangle, polygon_base::RegularPolygon)PLUGINLIB_EXPORT_CLASS(polygon_plugins::Square, polygon_base::RegularPolygon)
5.构建插件库
在 CMakeLists.txt 文件中设置内容如下:
include_directories(include)add_library(polygon_plugins src/polygon_plugins.cpp)
至此,可以调用 catkin_make 编译,编译完成后,在工作空间/devel/lib目录下,会生成相关的 .so 文件。
6.使插件可用于ROS工具链
6.1配置xml 功能包下新建文件:polygon_plugins.xml,内容如下:6.2导出插件 package.xml文件中设置内容如下:
<!-- 插件库的相对路径 --><library path="lib/libpolygon_plugins"><!-- type="插件类" base_class_type="基类" --><class type="polygon_plugins::Triangle" base_class_type="polygon_base::RegularPolygon"><!-- 描述信息 --><description>This is a triangle plugin.</description></class><class type="polygon_plugins::Square" base_class_type="polygon_base::RegularPolygon"><description>This is a square plugin.</description></class></library>
<export><xxx plugin="${prefix}/polygon_plugins.xml" /></export>
标签
编译后,可以调用rospack plugins —attrib=plugin xxx命令查看配置是否正常,如无异常,会返回 .xml 文件的完整路径,这意味着插件已经正确的集成到了ROS工具链。
7.使用插件
src 下新建c++文件:polygon_loader.cpp,内容如下:
//类加载器相关的头文件#include <pluginlib/class_loader.h>#include <xxx/polygon_base.h>int main(int argc, char** argv){//类加载器 -- 参数1:基类功能包名称 参数2:基类全限定名称pluginlib::ClassLoader<polygon_base::RegularPolygon> poly_loader("xxx", "polygon_base::RegularPolygon");try{//创建插件类实例 -- 参数:插件类全限定名称boost::shared_ptr<polygon_base::RegularPolygon> triangle = poly_loader.createInstance("polygon_plugins::Triangle");triangle->initialize(10.0);boost::shared_ptr<polygon_base::RegularPolygon> square = poly_loader.createInstance("polygon_plugins::Square");square->initialize(10.0);ROS_INFO("Triangle area: %.2f", triangle->area());ROS_INFO("Square area: %.2f", square->area());}catch(pluginlib::PluginlibException& ex){ROS_ERROR("The plugin failed to load for some reason. Error: %s", ex.what());}return 0;}
8.执行
修改CMakeLists.txt文件,内容如下:编译然后执行:polygon_loader,结果如下:
add_executable(polygon_loader src/polygon_loader.cpp)target_link_libraries(polygon_loader ${catkin_LIBRARIES})
[ INFO] [WallTime: 1279658450.869089666]: Triangle area: 43.30[ INFO] [WallTime: 1279658450.869138007]: Square area: 100.00
10.4 notelet
ROS通信是基于Node(节点)的,Node使用方便、易于扩展,可以满足ROS中大多数应用场景,但是也存在一些局限性,由于一个Node启动之后独占一根进程,不同Node之间数据交互其实是不同进程之间的数据交互,当传输类似于图片、点云的大容量数据时,会出现延时与阻塞的情况,比如:
现在需要编写一个相机驱动,在该驱动中有两个节点实现:其中节点A负责发布原始图像数据,节点B订阅原始图像数据并在图像上标注人脸。如果节点A与节点B仍按照之前实现,两个节点分别对应不同的进程,在两个进程之间传递容量可观图像数据,可能就会出现延时的情况,那么该如何优化呢? ROS中给出的解决方案是:Nodelet,通过Nodelet可以将多个节点集成进一个进程。概念
nodelet软件包旨在提供在同一进程中运行多个算法(节点)的方式,不同算法之间通过传递指向数据的指针来代替了数据本身的传输(类似于编程传值与传址的区别),从而实现零成本的数据拷贝。 nodelet功能包的核心实现也是插件,是对插件的进一步封装:- 不同算法被封装进插件类,可以像单独的节点一样运行;
- 在该功能包中提供插件类实现的基类:Nodelet;
- 并且提供了加载插件类的类加载器:NodeletLoader。
作用
应用于大容量数据传输的场景,提高节点间的数据交互效率,避免延时与阻塞。另请参考:
- http://wiki.ros.org/nodelet/
- http://wiki.ros.org/nodelet/Tutorials/Running%20a%20nodelet
- https://github.com/ros/common_tutorials/tree/noetic-devel/nodelet_tutorial_math
10.4.1使用演示
在ROS中内置了nodelet案例,我们先以该案例演示nodelet的基本使用语法,基本流程如下:
- 案例简介;
- nodelet基本使用语法;
- 内置案例调用。
1.案例简介
以“ros- [ROS_DISTRO] -desktop-full”命令安装ROS时,nodelet默认被安装,如未安装,请调用如下命令自行安装:在该案例中,定义了一个Nodelet插件类:Plus,这个节点可以订阅一个数字,并将订阅到的数字与参数服务器中的 value 参数相加后再发布。
sudo apt install ros-<<ROS_DISTRO>>-nodelet-tutorial-math
需求:再同一线程中启动两个Plus节点A与B,向A发布一个数字,然后经A处理后,再发布并作为B的输入,最后打印B的输出。
2.nodelet 基本使用语法
使用语法如下:
nodelet load pkg/Type manager - Launch a nodelet of type pkg/Type on manager managernodelet standalone pkg/Type - Launch a nodelet of type pkg/Type in a standalone nodenodelet unload name manager - Unload a nodelet a nodelet by name from managernodelet manager - Launch a nodelet manager node
3.内置案例调用
1.启动roscore
roscore
2.启动manager
__name:= 用于设置管理器名称。
rosrun nodelet nodelet manager __name:=mymanager
3.添加nodelet节点
添加第一个节点:添加第二个节点:
rosrun nodelet nodelet load nodelet_tutorial_math/Plus mymanager __name:=n1 _value:=100
PS: 解释 rosrun nodelet nodelet load nodelet_tutorial_math/Plus mymanager __name:=n1 _value:=100
rosrun nodelet nodelet load nodelet_tutorial_math/Plus mymanager __name:=n2 _value:=-50 /n2/in:=/n1/out
- rosnode list 查看,nodelet 的节点名称是: /n1;
- rostopic list 查看,订阅的话题是: /n1/in,发布的话题是: /n1/out;
- rosparam list查看,参数名称是: /n1/value。
- 第二个nodelet 与第一个同理;
- 第二个nodelet 订阅的话题由 /n2/in 重映射为 /n1/out。
优化:也可以将上述实现集成进launch文件:
<launch><!-- 设置nodelet管理器 --><node pkg="nodelet" type="nodelet" name="mymanager" args="manager" output="screen" /><!-- 启动节点1,名称为 n1, 参数 /n1/value 为100 --><node pkg="nodelet" type="nodelet" name="n1" args="load nodelet_tutorial_math/Plus mymanager" output="screen" ><param name="value" value="100" /></node><!-- 启动节点2,名称为 n2, 参数 /n2/value 为-50 --><node pkg="nodelet" type="nodelet" name="n2" args="load nodelet_tutorial_math/Plus mymanager" output="screen" ><param name="value" value="-50" /><remap from="/n2/in" to="/n1/out" /></node></launch>
4.执行
向节点n1发布消息:打印节点n2发布的消息:
rostopic pub -r 10 /n1/in std_msgs/Float64 "data: 10.0"
最终输出结果应该是:60。
rostopic echo /n2/out
10.4.2 notelet实现
nodelet本质也是插件,实现流程与插件实现流程类似,并且更为简单,不需要自定义接口,也不需要使用类加载器加载插件类。
需求:参考 nodelet 案例,编写 nodelet 插件类,可以订阅输入数据,设置参数,发布订阅数据与参数相加的结果。
流程:
- 准备;
- 创建插件类并注册插件;
- 构建插件库;
- 使插件可用于ROS工具链;
- 执行。
1.准备
新建功能包,导入依赖: roscpp、nodelet;2.创建插件类并注册插件
#include "nodelet/nodelet.h"#include "pluginlib/class_list_macros.h"#include "ros/ros.h"#include "std_msgs/Float64.h"namespace nodelet_demo_ns {class MyPlus: public nodelet::Nodelet {public:MyPlus(){value = 0.0;}void onInit(){//获取 NodeHandleros::NodeHandle& nh = getPrivateNodeHandle();//从参数服务器获取参数nh.getParam("value",value);//创建发布与订阅对象pub = nh.advertise<std_msgs::Float64>("out",100);sub = nh.subscribe<std_msgs::Float64>("in",100,&MyPlus::doCb,this);}//回调函数void doCb(const std_msgs::Float64::ConstPtr& p){double num = p->data;//数据处理double result = num + value;std_msgs::Float64 r;r.data = result;//发布pub.publish(r);}private:ros::Publisher pub;ros::Subscriber sub;double value;};}PLUGINLIB_EXPORT_CLASS(nodelet_demo_ns::MyPlus,nodelet::Nodelet)
3.构建插件库
CMakeLists.txt配置如下:
...add_library(mynodeletlibsrc/myplus.cpp)...target_link_libraries(mynodeletlib${catkin_LIBRARIES})
编译后,会在 工作空间/devel/lib/先生成文件: libmynodeletlib.so。
4.使插件可用于ROS工具链
4.1配置xml
新建 xml 文件,名称自定义(比如:my_plus.xml),内容如下:
<library path="lib/libmynodeletlib"><class name="demo04_nodelet/MyPlus" type="nodelet_demo_ns::MyPlus" base_class_type="nodelet::Nodelet" ><description>hello</description></class></library>
4.2导出插件
<export><!-- Other tools can request additional information be placed here --><nodelet plugin="${prefix}/my_plus.xml" /></export>
5.执行
可以通过launch文件执行nodelet,示例内容如下:
<launch><node pkg="nodelet" type="nodelet" name="my" args="manager" output="screen" /><node pkg="nodelet" type="nodelet" name="p1" args="load demo04_nodelet/MyPlus my" output="screen"><param name="value" value="100" /><remap from="/p1/out" to="con" /></node><node pkg="nodelet" type="nodelet" name="p2" args="load demo04_nodelet/MyPlus my" output="screen"><param name="value" value="-50" /><remap from="/p2/in" to="con" /></node></launch>
运行launch文件,可以参考上一节方式向 p1发布数据,并订阅p2输出的数据,最终运行结果也与上一节类似。
10.5本章小结
本章介绍了ROS中的一些进阶内容,主要内容如下:- Action 通信;
- 动态参数;
- pluginlib;
- nodelet。

若有收获,就点个赞吧
0 人点赞
