学习目标

include “config.h”
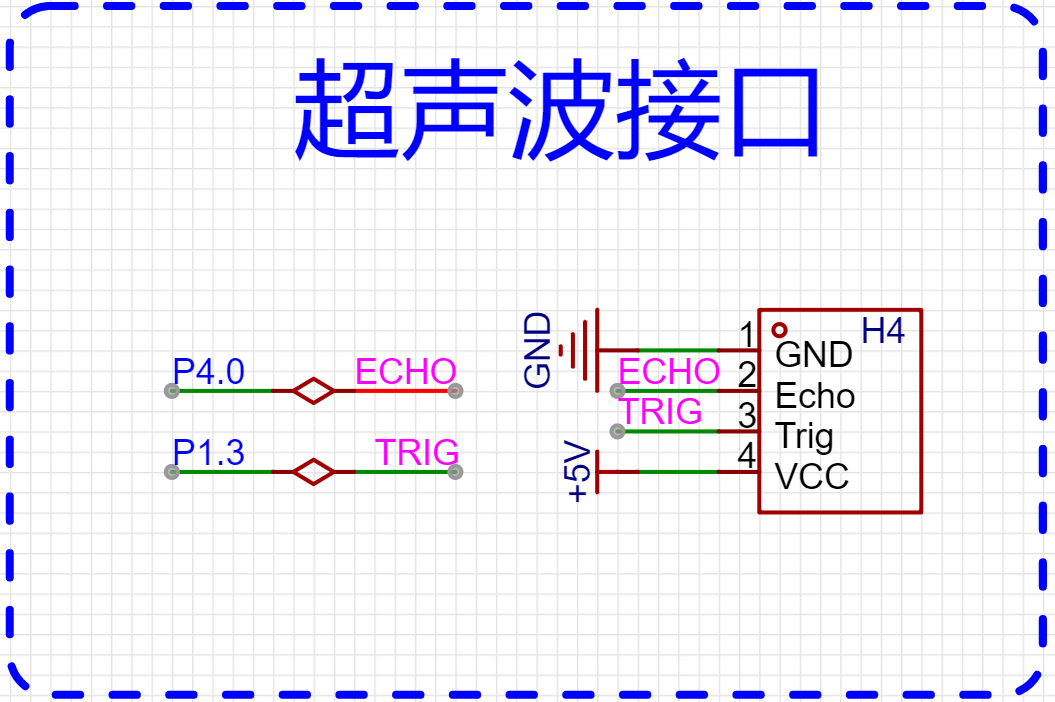
define ULTRASONIC_ECHO P40
define ULTRASONIC_TRIG P13
define ULTRASONIC_PIN_INIT() {P1M1 &= ~0x08, P1M0 |= ~0x08, P4M1 &= ~0x01, P4M0 &= ~0x01;}
void Ultrasonic_init();
u8 Ultrasonic_get_distance(float *distance);
endif
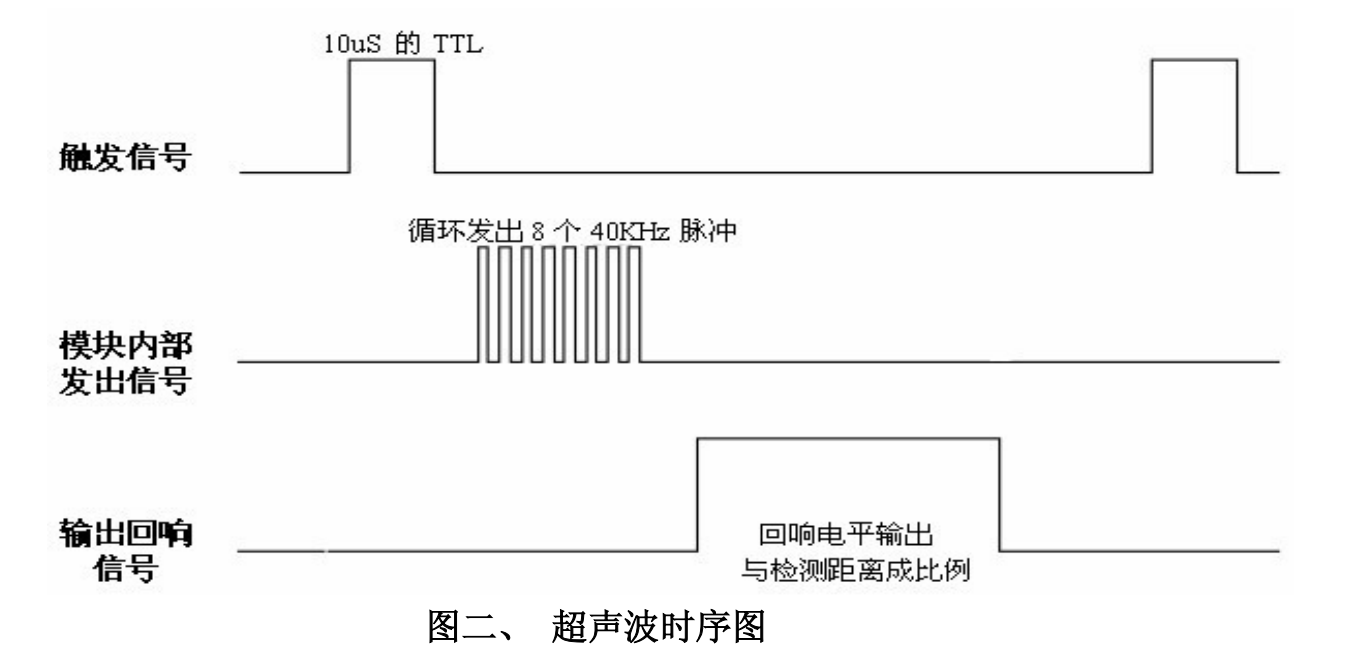
```c#include "Ultrasonic.h"static void Delay10us() //@24.000MHz{unsigned char i;i = 78;while (--i);}void Ultrasonic_init() {ULTRASONIC_PIN_INIT();}u8 Ultrasonic_get_distance(float *distance) {u8 flag = 0;u16 cnt = 20;//////////////// 触发测距 /////////////////ULTRASONIC_TRIG = 1;Delay10us();ULTRASONIC_TRIG = 0;do {Delay10us();} while(--cnt);do {if(ULTRASONIC_ECHO == 1) {if(flag == 0) {cnt = 0;flag = 1;}cnt++;} else {break;}Delay10us();} while(cnt < 2360);if(cnt <= 12 || cnt >= 2360) {// 距离小或者超出return 0;}// 340 m/s// 340 m/ 1000 000us// 10us = 340m/100000// 10us == 1cnt// m*distance = cnt * 34.0 / 10000.0 / 2;}
练习题
- 实现超声波测距驱动

若有收获,就点个赞吧
0 人点赞
